Радиогидроакустический буй длительного дежурства. Предложение по военно-морской разведке.
Недавно мелькала новость об Ил-38, что сподвигло меня прочитать немного истории его разработки. Занимательная история рождения в инженерно-бюрократических муках. Но речь ниже пойдет о его средствах, а именно о радиогидроакустических буях.
Актуальные образцы
Радиогидроакустический буй РГБ-1А -
Авиационный радиогидроакустический буй пассивного типа ненаправленного действия для обнаружения подлодок в погружённом положении по создаваемым ими шумам и передачи соответствующей информации по радиолинии о наличии подлодки в радиусе его действия.
ТХ: длина кабеля = 35-70 м, дальность обнаружения ПЛ = 2 км, время непрерывной работы = 2,5 ч, время работы на излучение = 45 мин., время самоликвидации = 3 ч, дальность связи = 40 км, высота сброса = 200-2000 м, масса = 15 кг, скорость сброса с носителя = 700 км/ч, скорость приводнения = 35 м/с, высота волн = до 5 баллов, комплект = 24 шт.

Радиогидроакустический буй РГБ-25 -
Радиогидроакустический буй пассивного типа направленного действия для обнаружения подлодок в погружённом положении по создаваемым ими шумовому полю и передачи по радиолинии на самолёт информации о пеленге на подлодку относительно буя, а также определения местоположения буя относительно самолёта.
ТХ: дальность обнаружения цели = не менее 1 км, время работы = 30 мин., время работы на излучение = 45 мин., время самоликвидации = 3 ч, дальность связи буй-самолёт по каналу информации = не менее 40 км, дальность связи буй-самолёт по каналу маяка-ответчика = не менее 30 км, высота сброса = 250-2000 м, масса = 45 кг, скорость сброса с носителя = до 750 км/ч, глубина погружения гидрофона = 20-200 м, высота волн = до 5 баллов, габариты = 230х1855 мм, комплект = 10 шт.

Радиогидроакустический буй РГБ-55А -
Радиогидроакустический буй активного типа ненаправленного действия с формированием зондирующих сигналов на борту самолёта для обнаружения подлодок и передачи на борт самолёта информации для определения координат и параметров движения погружённой подлодки, а также приёма-передачи информации для определения местоположения буя относительно самолёта.
ТХ: дальность обнаружения цели = не менее 5 км, время готовности к работе = 30 сек., дальность связи буй-самолёт по каналу информации = не менее 30 км, высота сброса = 250-2000 м, масса = 55 кг, скорость сброса с носителя = до 750 км/ч, глубина погружения гидрофона = 20-200 м, высота волн = до 5 баллов, комплект = 16 шт.

Радиогидроакустический буй РГБ-16-1 -
Авиационный радиогидроакустический буй пассивного типа ненаправленного действия для обнаружения движущихся подлодок по создаваемым ими шумовым сигналам и ретрансляции этих сигналов на борт носителя, приёма и ретрансляции сигналов радиолокационной станции носителя.
ТХ: длина кабеля = 300 м, чувствительность гидрофона = 4200-7800 мкВ*Па, время непрерывной работы = 5 ч, время готовности к работе = менее 1 мин., время самоликвидации = не позднее 40 ч, высота сброса = 200-2000 м, масса = 10 кг, скорость сброса с носителя = до 600 км/ч, скорость приводнения = менее 18 м/с, высота волн = до 5 баллов, комплект = 64 шт.


Радиотелеметрический буй РТБ-91 -
Автономное устройство одноразового применения для снятия и передачи на борт самолёта данных о вертикальном распределении скорости распростанения звука в морской воде, используемых при поиске подлодок противника.
ТХ: диапазон измерения скорости распространения звука = 1400-1550 м/c, дальность связи = 40 км, время работы = не более 10 мин., время готовности к работе = не более 3 мин., высота сбрасывания = 200-2000 м, масса = 13,5 кг, время самоликвидации = 6 ч, дальность связи = 45-60 км, скорость сбрасывания = до 700 км/ч, солёность моря = 19-40 %, высота волн = до 5 баллов, гидростатическое давление = от 0 до 20 кг/куб.см, глубина непрерывного определения вертикального распределения скорости распростанения звуа = 5-200 м, масса буя = 14,5 кг, комплект = 2 шт.

Как можно заметить, автономные источники питания не позволяют длительное использование таких буев. Со своей стороны хотел бы предложить способ увеличение времени дежурства - использование портативных электрогенераторов.
О строении волнового электрогенератора РГБ
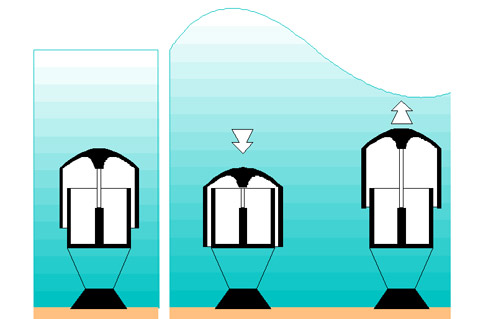
Пустотелый цилиндр изнутри заполненный газом (аналогично пружинке на штоке). Нижняя часть цилиндра крепится к гидроакустическому прибору (гидрофону), находящийся на глубине более 70 м, верхняя же находится в свободном плавании , то есть может двигаться вверх-вниз относительно нижней части.
Принцип действия: проходящая над буем волна давит на верхнюю часть цилиндра, заставляя её проседать под своей тяжестью, а газ внутри - сжиматься. Как только волна уходит, давление понижается, и верхняя часть цилиндра поднимается обратно.
Такое механическое поступательное движение вверх-вниз преобразуется в электричество с помощью линейного генератора (обычных катушки и магнита). Возможно дополнение\замена с применением пьезоэлектрических кристаллов.
Условная схема работы (здесь предусматривается крепление ко дну, как у многих волновых электрогенераторов, но принцип работы проиллюстирован):
О ветряном электрогенераторе РГБ
Если буй располагается на поверхности, то не исключается крепление небольшого ветряка в сочетании с пьезоэлектрическими кристаллами:

Данный образец способен генерировать при скорости ветра 16 км\ч до 7,5 миливатт.
О солнечных батареях
Возможно использование и солнечных батарей достаточной площади на поверхности буя. Как правило комплекс решений эффективнее единичного.

Полученной данными способами энергии должно хватить для продолжительной автономности буя. При необходимости ремонтные бригады могут чинить их на месте и\или отбуксировывать, время от времени, на место дежурства из-за сноса течением.
Надводная радиолокация
Представляется также работоспособным идея аэростатных-РЛС, упомянутая в средствах наблюдения пограничных аэромобильных войск. Но в данном случае крепление производится к буям. То есть данные буи смогут уже пеленговать не только подводное пространство, но и надводное.

Высота подъема аэростата выбирается исходя из габаритных размеров пеленгуемыех объектов и радиогоризонта. Недостатком данной системы является ее уязвимость к ураганным ветрам.
Применение

Система линейно-соточного расположения приемников-буев. Активно-пассивная радиогидролокация.
Что представляют собой такие системы? Группа заранее размещенных в море излучателей (установленных либо на дне, либо на заданной глубине или же буксируемых) посылает по заданной программе в установленных частотных диапазонах и интервалах времени акустические сигналы. Эти сигналы принимает целая сеть также заранее развернутых специальных антенн (они могут быть размещены на подводных лодках, надводных кораблях, системах сбрасываемых радиогидроакустических буев, антенных решетках, размещенных на дне, и т. д.).
Эта группа работает как одно гигантское гидролокационное устройство, позволяющее в кратчайший срок по эхосигналам получить координаты зашедшей в зону ответственности системы цели.
Собственно описанное предложение вносит лишь функцию стационарности, ремонтопригодности применяемых устройств без их потери.
PS
Кажется в одном я немного опоздал - Уральский морской буй прошел первое тестирование во Владивостоке. В 2014 г Алексей Елесеев на 100 Вт волновой генератор сделал, пока пустой.
Материалы по теме:
avsem - Выставка авиации Тихоокеанского флота
В Австралии разработаны буи, превращающие энергию волн в электричество
Карманный ветряк будет питать беспроводные датчики
Норвежцы планируют построить плавающие ветровые электростанции
Бистатическая радиолокация земной поверхности с помощью спутников.pdf
Найти невидимку: Системы обнаружения субмарин
Spin Cell - новое слово в солнечной энергии. Как сделать солнечные панели эффективнее?
Введение в беспроводную технологию ZIGBEE стандарта 802.15.4.pdf
Радиосети для сбора данных от сенсоров, мониторинга и управления на основе стандарта IEEE 802.15.4.pdf
Состояние и перспективы развития пьезоэлектрических генераторов
Актуальные образцы
Радиогидроакустический буй РГБ-1А -
Авиационный радиогидроакустический буй пассивного типа ненаправленного действия для обнаружения подлодок в погружённом положении по создаваемым ими шумам и передачи соответствующей информации по радиолинии о наличии подлодки в радиусе его действия.
ТХ: длина кабеля = 35-70 м, дальность обнаружения ПЛ = 2 км, время непрерывной работы = 2,5 ч, время работы на излучение = 45 мин., время самоликвидации = 3 ч, дальность связи = 40 км, высота сброса = 200-2000 м, масса = 15 кг, скорость сброса с носителя = 700 км/ч, скорость приводнения = 35 м/с, высота волн = до 5 баллов, комплект = 24 шт.
Радиогидроакустический буй РГБ-25 -
Радиогидроакустический буй пассивного типа направленного действия для обнаружения подлодок в погружённом положении по создаваемым ими шумовому полю и передачи по радиолинии на самолёт информации о пеленге на подлодку относительно буя, а также определения местоположения буя относительно самолёта.
ТХ: дальность обнаружения цели = не менее 1 км, время работы = 30 мин., время работы на излучение = 45 мин., время самоликвидации = 3 ч, дальность связи буй-самолёт по каналу информации = не менее 40 км, дальность связи буй-самолёт по каналу маяка-ответчика = не менее 30 км, высота сброса = 250-2000 м, масса = 45 кг, скорость сброса с носителя = до 750 км/ч, глубина погружения гидрофона = 20-200 м, высота волн = до 5 баллов, габариты = 230х1855 мм, комплект = 10 шт.
Радиогидроакустический буй РГБ-55А -
Радиогидроакустический буй активного типа ненаправленного действия с формированием зондирующих сигналов на борту самолёта для обнаружения подлодок и передачи на борт самолёта информации для определения координат и параметров движения погружённой подлодки, а также приёма-передачи информации для определения местоположения буя относительно самолёта.
ТХ: дальность обнаружения цели = не менее 5 км, время готовности к работе = 30 сек., дальность связи буй-самолёт по каналу информации = не менее 30 км, высота сброса = 250-2000 м, масса = 55 кг, скорость сброса с носителя = до 750 км/ч, глубина погружения гидрофона = 20-200 м, высота волн = до 5 баллов, комплект = 16 шт.
Радиогидроакустический буй РГБ-16-1 -
Авиационный радиогидроакустический буй пассивного типа ненаправленного действия для обнаружения движущихся подлодок по создаваемым ими шумовым сигналам и ретрансляции этих сигналов на борт носителя, приёма и ретрансляции сигналов радиолокационной станции носителя.
ТХ: длина кабеля = 300 м, чувствительность гидрофона = 4200-7800 мкВ*Па, время непрерывной работы = 5 ч, время готовности к работе = менее 1 мин., время самоликвидации = не позднее 40 ч, высота сброса = 200-2000 м, масса = 10 кг, скорость сброса с носителя = до 600 км/ч, скорость приводнения = менее 18 м/с, высота волн = до 5 баллов, комплект = 64 шт.
Радиотелеметрический буй РТБ-91 -
Автономное устройство одноразового применения для снятия и передачи на борт самолёта данных о вертикальном распределении скорости распростанения звука в морской воде, используемых при поиске подлодок противника.
ТХ: диапазон измерения скорости распространения звука = 1400-1550 м/c, дальность связи = 40 км, время работы = не более 10 мин., время готовности к работе = не более 3 мин., высота сбрасывания = 200-2000 м, масса = 13,5 кг, время самоликвидации = 6 ч, дальность связи = 45-60 км, скорость сбрасывания = до 700 км/ч, солёность моря = 19-40 %, высота волн = до 5 баллов, гидростатическое давление = от 0 до 20 кг/куб.см, глубина непрерывного определения вертикального распределения скорости распростанения звуа = 5-200 м, масса буя = 14,5 кг, комплект = 2 шт.
Как можно заметить, автономные источники питания не позволяют длительное использование таких буев. Со своей стороны хотел бы предложить способ увеличение времени дежурства - использование портативных электрогенераторов.
О строении волнового электрогенератора РГБ
Пустотелый цилиндр изнутри заполненный газом (аналогично пружинке на штоке). Нижняя часть цилиндра крепится к гидроакустическому прибору (гидрофону), находящийся на глубине более 70 м, верхняя же находится в свободном плавании , то есть может двигаться вверх-вниз относительно нижней части.
Принцип действия: проходящая над буем волна давит на верхнюю часть цилиндра, заставляя её проседать под своей тяжестью, а газ внутри - сжиматься. Как только волна уходит, давление понижается, и верхняя часть цилиндра поднимается обратно.
Такое механическое поступательное движение вверх-вниз преобразуется в электричество с помощью линейного генератора (обычных катушки и магнита). Возможно дополнение\замена с применением пьезоэлектрических кристаллов.
Условная схема работы (здесь предусматривается крепление ко дну, как у многих волновых электрогенераторов, но принцип работы проиллюстирован):
О ветряном электрогенераторе РГБ
Если буй располагается на поверхности, то не исключается крепление небольшого ветряка в сочетании с пьезоэлектрическими кристаллами:
Данный образец способен генерировать при скорости ветра 16 км\ч до 7,5 миливатт.
О солнечных батареях
Возможно использование и солнечных батарей достаточной площади на поверхности буя. Как правило комплекс решений эффективнее единичного.
Полученной данными способами энергии должно хватить для продолжительной автономности буя. При необходимости ремонтные бригады могут чинить их на месте и\или отбуксировывать, время от времени, на место дежурства из-за сноса течением.
Надводная радиолокация
Представляется также работоспособным идея аэростатных-РЛС, упомянутая в средствах наблюдения пограничных аэромобильных войск. Но в данном случае крепление производится к буям. То есть данные буи смогут уже пеленговать не только подводное пространство, но и надводное.

Высота подъема аэростата выбирается исходя из габаритных размеров пеленгуемыех объектов и радиогоризонта. Недостатком данной системы является ее уязвимость к ураганным ветрам.
Применение
Система линейно-соточного расположения приемников-буев. Активно-пассивная радиогидролокация.
Что представляют собой такие системы? Группа заранее размещенных в море излучателей (установленных либо на дне, либо на заданной глубине или же буксируемых) посылает по заданной программе в установленных частотных диапазонах и интервалах времени акустические сигналы. Эти сигналы принимает целая сеть также заранее развернутых специальных антенн (они могут быть размещены на подводных лодках, надводных кораблях, системах сбрасываемых радиогидроакустических буев, антенных решетках, размещенных на дне, и т. д.).
Эта группа работает как одно гигантское гидролокационное устройство, позволяющее в кратчайший срок по эхосигналам получить координаты зашедшей в зону ответственности системы цели.
Собственно описанное предложение вносит лишь функцию стационарности, ремонтопригодности применяемых устройств без их потери.
PS
Кажется в одном я немного опоздал - Уральский морской буй прошел первое тестирование во Владивостоке. В 2014 г Алексей Елесеев на 100 Вт волновой генератор сделал, пока пустой.
Материалы по теме:
avsem - Выставка авиации Тихоокеанского флота
В Австралии разработаны буи, превращающие энергию волн в электричество
Карманный ветряк будет питать беспроводные датчики
Норвежцы планируют построить плавающие ветровые электростанции
Бистатическая радиолокация земной поверхности с помощью спутников.pdf
Найти невидимку: Системы обнаружения субмарин
Spin Cell - новое слово в солнечной энергии. Как сделать солнечные панели эффективнее?
Введение в беспроводную технологию ZIGBEE стандарта 802.15.4.pdf
Радиосети для сбора данных от сенсоров, мониторинга и управления на основе стандарта IEEE 802.15.4.pdf
Состояние и перспективы развития пьезоэлектрических генераторов