Робот Qbo
Qbo - это полуметровый социальный робот от фирмы TheCorpora (похоже, разработка ведётся в Испании, а производиться робот будет в Тайване).
Работает робот на ПО с открытым исходным кодом (Linux и ROS (от компании Willow Garage)).
Прототип Qbo появился более года назад, а затем тестировался и дорабатывался. В июле этого года, разработчики Qbo опубликовали результаты своих трудов и выложили в сеть ролик о работе Qbo.
Характеристики Qbo
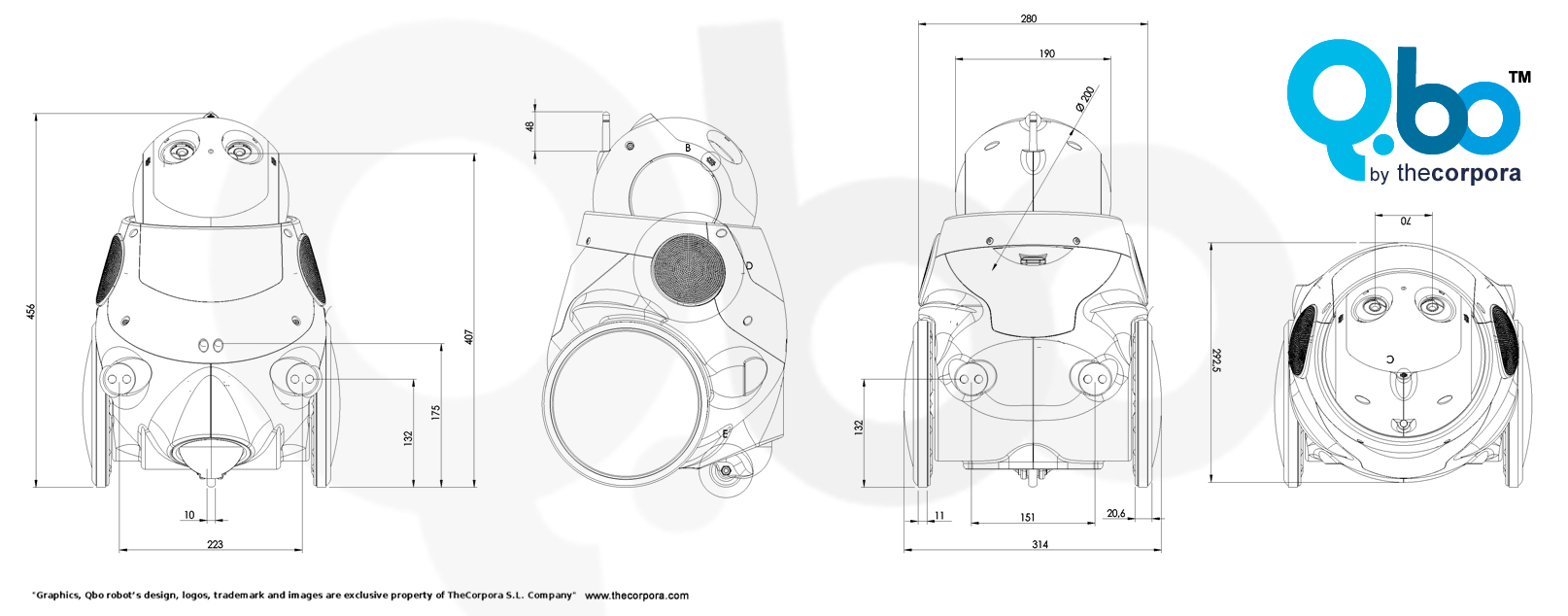
Высота: 456mm
Ширина: 314mm
Толщина: 292,5mm
Вес: приблизительно 9-11Kg.
Зарядка: автоподзарядка от док-станции
Голова
Уши: 2 всенаправленных & 1 однонаправленный микрофоны
Глаза: 2 Webcams HiDef & 2 Eyelids
Движение: 4 сервомашинки ( вврех-вниз, враво-влево )
Рот: 20 светодиодов
Нос: 1 Led
Связь: Wifi Pcb 802g/n & антенна & Bluetooth
QPR2 1 Pcb Hardware controller
Туловище
Сенсоры: 4 Ultrasonic, 1 Sharp & 3 Infrared
Моторы: 2 DC Motors with Magnetic encoder ( 170 RPM )
Колёса: 2 Wheels ( rear ) & 1 Free Wheel ( front)
Звук: 2 High Quality Speakers
Контроллер: 1 Mini-Itx main board powered by ATOM & Nvdia ION Graphic
QPR1 1 Pcb Hardware controller
Батарея: 1 Sealed battery (7.5Ah)
Robot Status 1 Lcd Display 20?4
Некоторые навыки Qbo:
стереоскопическое зрение
система распознавания речи
система синтеза речи (Speech Synthesis System)
Qbo’s API & Web control panel
связь по Wifi & Bluetooth
Qbo избегает столкновений и падений благодаря ультразвуковым датчикам расстояния
Сначала, Qbo работал на Ubuntu Linux, но разработчиков не устраивала перегруженность системы лишними пакетами и скорость загрузки с Compact Flash.
Разработчиками было принято решение о создании дистрибутива Linux специально для Qbo.
Совместно с разработчиками Guadalinex
был выпущен дистрибутив OpenQbo (Alpha-версия), основанный на Ubuntu 10.04
Предустановленные пакеты OpenQbo:
Gnome - графическая оболочка (авторы OpenQbo знают, что существуют и более лёгкие графические оболочки, но считают, что Гном - одна из надёжных и стабильных систем, которая к тому же замечательно работает на платах на базе Intel ATOM с 1 Gb RAM. Впрочем, авторы не исключают возможности отказа от Гнома.)
Festival - речевой движок (разработан в университете Эдинбурга(University of Edinburgh)). Этот движок и различные инструменты, разработанные университетом Карнеги-Меллона(Carnegie Mellon University), в рамках проекта FestVox, позволяют создать голос очень высокого качества.
Julius - движок распознавания речи. Julius был первоначально разработан японским LVCSR в 1997 году, был продолжен CSRC (Continuous Speech Recognition Consortium - Консорциум непрерывного распознавания речи) с 2000 по 2003 год, и в настоящее время разработывается ISTC (Interactive Speech Technology Consortium - Консорциум интерактивных речевых технологий).
Julius требует предварительно обученных грамматической и акустической моделей. На данный момент, нет акустической модели, которая полностью разработана для Julius на английском или испанском языках; в основном из-за большого количества голосовых транскрипций, которые необходимы для достижения оптимального распознавания.
Существует проект под названием VoxForge, созданный Ken MacLean в 2005 году, который собирает транскрибируемый текст, который затем может быть использован в OpenSource-ных системах распознавания речи; таких как Julius или Sphinx.
ROS - мета-операционная система. Разработана командой Willow Garage, позволяет управлять различными типами аппаратных компонентов через подписку на узлах.
OpenCV - система технического зрения. Первоначально разработанная Intel в 1999 году и в настоящее время поддерживается Willow Garage. OpenCV содержит более 500 функций, ориентированных на технического зрение: обнаружение человека и других объектов, калибровка веб-камеры, стереоскопическое зрение и т.д.
Apache - веб-сервер. К Qbo можно получить доступ разными путями и веб-сервер Apache является одним из них. Веб-сервер позволяет получить доступ к GUI робота с любого удалённого веб-браузера. Это полезно для пользователей, которые не имют опыта работы с Linux, но хотят получить доступ к определенным функциям робота.
SSH - (клиент и сервер) безопасный протокол, для удаленного доступа к командной оболочке Linux. Весь трафик между роботом и удаленным компьютером (команды, приём/передача файлов или визуализации) всегда осуществляются по протоколу, защищенному RSA-кодами.
MySQL - сервер баз данных.
Firestarter - Firewall. Безопасность также очень важна в мире Linux, поэтому была добавлена мощная программа, которая полностью графическим способом позволяет контролировать входящий и исходящий трафик.
Qbo GUI - графический интерфейс взаимодействия с роботом. Разработан TheCorpora и позволяет легко получить доступ ко всем функциями робота. На данный момент он не был установлен так как не является достаточно стабильным, но будет установлен на будущие версии OpenQbo.
Другие необходимые пакеты, (ориентированные на робототехнику):
* последние драйверы ALSA - необходимы для работы Julius.
* PHP - для проектирования Qbo GUI.
* Gstreamer - нужно, среди прочего, чтобы получать изображения с веб-камер Qbo.
* GCC - компилятор для C
* Python - язык высокого уровня. Полезен, чтобы быстро создавать небольшие программные модули, например, для ROS.
Прототип робота Qbo работал на плате формата Mini-ITX, ASUS AT3IONT-I
Последние новости Qbo
Робота Qbo научили отвечать на вопросы собеседника, используя материалы из википедии.
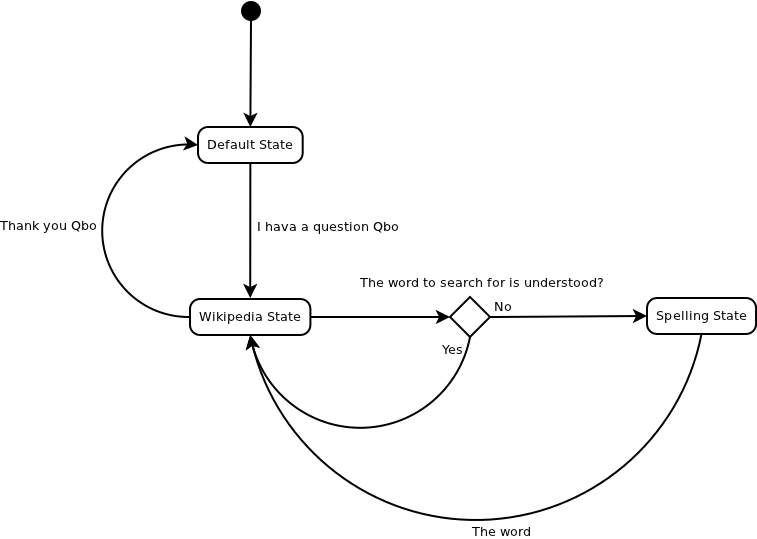
Достаточно обратиться к роботу и произнести фразу «I have a question, Qbo» («У меня есть вопрос, Qbo»). Qbo уточнит - правильно ли расслышал вопрос, а потом зачитает выдержку из википедии. Предусмотрен вариант и отсутствия слова в базе Qbo - в этом случае, робот попросит произнести слово по буквам.
Недавно появилось видео, на котором робот учится распознавать самого себя в зеркале:
После того, как социального робота Qbo научили распознавать себя в зеркале оставался один шаг до распознавания другого робота Qbo.
Чтобы робот смог отличить своё отражение в зеркале от другого робота, разработчики реализовали, чтобы в процессе распознавания, светодиодный нос робота мигал случайным образом. Вероятность того, что два робота будут генерировать одинаковую последовательность вспышек очень низка и этим достигается успешное распознавание другого робота.
Распознав другого аналогичного робота, Qbo может с ним поговорить.
В отличие от стандартной практики, когда роботы взаимодействуют между собой по какому-нибудь протоколу, разработчики Qbo, используют программное обеспечение для распознавания речи (Julius) и синтеза голоса (Festival), что позволяет одному роботу распознавать речь другого и соответствующим образом реагировать на вопросы, используя небольшую запрограммированную базу знаний.
Т.о., используя динамик, микрофон и вышеупомянутое ПО, роботы Qbo способны вести беседу.
Социальный робот Qbo доступен для предзаказа (€755.00-€3,795.00)!
Проект Qbo, был задуман с твёрдым намерением создания платформы для разработки искусственного интеллекта, который с каждым днем сможет становиться немного умнее.
Чтобы добиться этого, были выделены два основных направления работы:
1. разработка стандартной робо-платформы, способствующей созданию экосистемы для исследований и развития сообщества;
2. создание дизайна, который является достаточно привлекательным для людей, чтобы использовать эту платформу в своей повседневной жизни.
Так же, в основе проекта лежит идеология Open Source. Так как, робототехника должна разрабатываться в рамках открытого общества, в котором не будет места старой модели замкнутых лабораторий, окруженных абсолютной секретностью, где группа инженеров работает над прототипами, которые никогда не увидят свет или, в лучшем случае, будут использоваться в качестве инструментов маркетинга для других продуктов никак не связаных с робототехникой.
По этим причинам, Qbo создаётся в виде недорогой открытой структуры, вокруг которой могла бы возникнуть реальная экосистема, позволяющая разрабатывать и улучшать алгоритмы искусственного интеллекта.
Сообщество робототехников, электронщиков и компьютерщиков, экспертов и любителей, которые смогут обмениваются между собой своими проектами и опытом, а в результате получить возможности неограниченного диапазона применений (безопасность, телемедицина, дистанционного присутствия и т.д.).
Проект Qbo, стал возможным благодаря компаниям, которые разделяют это видение:
Willow Garage, основанная Scott Hassan в 2006 году и её платформе для разработки - ROS.
Arduino - гибкость этой платформы позволила разработать два котроллера (из пяти содержащихся в Q.bo).
Linux - открытая операционная система, которая позволила всем компонентам платформы работать вместе.
Использование доступных и стандартных электронных компонентов, стало еще одним фактором, который является ключевым для Qbo, что позволило свести к минимуму усилия и посвятить все ресурсы базовой платформе, без необходимости изобретать велосипед.
Дизайн + Linux + Arduino + ROS + Стандарты = QBO
Именно благодаря всем этим преимуществам Open Source, Q.bo родился как платформа, которая сочетает в себе замечательный дизайн и новейшие технологии.
Наборы Q.bo
Q.bo Basic Kit (€755.00)
- базовый набор Q.bo, состоит из пластиковых деталей корпуса и механических частей робота. Так же, в базовый комплект входят две HD веб-камеры, антенна Wi-Fi и несколько Q.boards (только PCB).

Q.bo Complete Lite (€2,845.00)
- представляет собой полностью собранного робота Q.bo. Доступен выбор между Q.bo Complete Lite и Q.bo Complete Pro (€3,795.00). Версия Q.bo Complete Pro включает в себя материнскую плату Mini-ITX DQ67EP с процессором Intel Core i3 и 40Гб SSD-диск, а версия Q.bo Complete Lite поставляется с материнской платой Intel D2700MUD с микропроцессором Intel ATOM D2700 и 40Гб HDD. Обе версии поставляются с 2 Гб оперативной памяти DDR3.
Версии Q.bo Complete (Lite и Pro) предназначены для тех, кто не хочет тратить время на выбор и сборку компонентов робота. Например, для разработчиков программного обеспечения, эти версии позволят не беспокоиться о механической и электронной начинках робота и сосредоточиться на написании программного обеспечения.
Q.bo Complete Pro продается по более высокой цене, чем Q.bo Complete Lite, но он позволяет выполнять более тяжёлых вычислительных алгоритмов, большую плавность движений и большую скорость выполнения алгоритмов, благодаря гораздо более мощному микропроцессору Intel Core i3 (по сравнению с Intel ATOM D2700 в версии Q.bo Complete Lite).
Контроллеры Q.bo
Q.board1 - контроллер на базе МК ATmega1280 (совместим с Arduino IDE), с интегрированным драйвером двигателей (на L298N) (позволяет управлять два двигателя 12V, 2A).
Контроллер управляет:
* двумя двигателями (EMG30)
* аудио-усилителем (MAX9744)
* шиной I²C

Q.board2 - контроллер, распологающийся в голове Qbo (совместим со стандартной Arduino Duemilanove)
- контролирует светодиоды, изображающие рот робота

Q.board3 - контроль питания (на 32-битном stm32f103 Cortex-M3)

Q.board4 - плата с сенсорами (IMU) (3-х-осевые гироскоп (L3G4200D) и акселерометр (LIS35DE)), доступными по интерфейсу I²C.

Q.board5 - плата со светодиодами (20 стандартных светодиодов), изображающими «рот» робота

Система питания
Система питания, робота Qbo построена на:
* аккумуляторах
Optimum Battery LiFePO4 12.8V 10Ah

Iberobotics Battery LiFePO4 12.8V 10Ah
* DC/DC преобразователе PICOPSU 150-XT (ATX, 150 Watt) для питания встроенного компьютера формата Mini-ITX

* Адаптере AC/DC 15V, служащего для питания робота от сети и зарядки его аккумуляторов
Заказать робота Qbo можно здесь
Смотрите также:
Суперкомпьютер IBM Watson победил в телевикторине Jeopardy (российский аналог - Своя игра)
Робот NAO
Юмор на кремниевой основе
Передачи и документальные фильмы о роботах
Робот-мусорщик на улицах Печчоли
Работает робот на ПО с открытым исходным кодом (Linux и ROS (от компании Willow Garage)).
Прототип Qbo появился более года назад, а затем тестировался и дорабатывался. В июле этого года, разработчики Qbo опубликовали результаты своих трудов и выложили в сеть ролик о работе Qbo.
Характеристики Qbo
Высота: 456mm
Ширина: 314mm
Толщина: 292,5mm
Вес: приблизительно 9-11Kg.
Зарядка: автоподзарядка от док-станции
Голова
Уши: 2 всенаправленных & 1 однонаправленный микрофоны
Глаза: 2 Webcams HiDef & 2 Eyelids
Движение: 4 сервомашинки ( вврех-вниз, враво-влево )
Рот: 20 светодиодов
Нос: 1 Led
Связь: Wifi Pcb 802g/n & антенна & Bluetooth
QPR2 1 Pcb Hardware controller
Туловище
Сенсоры: 4 Ultrasonic, 1 Sharp & 3 Infrared
Моторы: 2 DC Motors with Magnetic encoder ( 170 RPM )
Колёса: 2 Wheels ( rear ) & 1 Free Wheel ( front)
Звук: 2 High Quality Speakers
Контроллер: 1 Mini-Itx main board powered by ATOM & Nvdia ION Graphic
QPR1 1 Pcb Hardware controller
Батарея: 1 Sealed battery (7.5Ah)
Robot Status 1 Lcd Display 20?4
Некоторые навыки Qbo:
стереоскопическое зрение
система распознавания речи
система синтеза речи (Speech Synthesis System)
Qbo’s API & Web control panel
связь по Wifi & Bluetooth
Qbo избегает столкновений и падений благодаря ультразвуковым датчикам расстояния
Сначала, Qbo работал на Ubuntu Linux, но разработчиков не устраивала перегруженность системы лишними пакетами и скорость загрузки с Compact Flash.
Разработчиками было принято решение о создании дистрибутива Linux специально для Qbo.
Совместно с разработчиками Guadalinex
был выпущен дистрибутив OpenQbo (Alpha-версия), основанный на Ubuntu 10.04
Предустановленные пакеты OpenQbo:
Gnome - графическая оболочка (авторы OpenQbo знают, что существуют и более лёгкие графические оболочки, но считают, что Гном - одна из надёжных и стабильных систем, которая к тому же замечательно работает на платах на базе Intel ATOM с 1 Gb RAM. Впрочем, авторы не исключают возможности отказа от Гнома.)
Festival - речевой движок (разработан в университете Эдинбурга(University of Edinburgh)). Этот движок и различные инструменты, разработанные университетом Карнеги-Меллона(Carnegie Mellon University), в рамках проекта FestVox, позволяют создать голос очень высокого качества.
Julius - движок распознавания речи. Julius был первоначально разработан японским LVCSR в 1997 году, был продолжен CSRC (Continuous Speech Recognition Consortium - Консорциум непрерывного распознавания речи) с 2000 по 2003 год, и в настоящее время разработывается ISTC (Interactive Speech Technology Consortium - Консорциум интерактивных речевых технологий).
Julius требует предварительно обученных грамматической и акустической моделей. На данный момент, нет акустической модели, которая полностью разработана для Julius на английском или испанском языках; в основном из-за большого количества голосовых транскрипций, которые необходимы для достижения оптимального распознавания.
Существует проект под названием VoxForge, созданный Ken MacLean в 2005 году, который собирает транскрибируемый текст, который затем может быть использован в OpenSource-ных системах распознавания речи; таких как Julius или Sphinx.
ROS - мета-операционная система. Разработана командой Willow Garage, позволяет управлять различными типами аппаратных компонентов через подписку на узлах.
OpenCV - система технического зрения. Первоначально разработанная Intel в 1999 году и в настоящее время поддерживается Willow Garage. OpenCV содержит более 500 функций, ориентированных на технического зрение: обнаружение человека и других объектов, калибровка веб-камеры, стереоскопическое зрение и т.д.
Apache - веб-сервер. К Qbo можно получить доступ разными путями и веб-сервер Apache является одним из них. Веб-сервер позволяет получить доступ к GUI робота с любого удалённого веб-браузера. Это полезно для пользователей, которые не имют опыта работы с Linux, но хотят получить доступ к определенным функциям робота.
SSH - (клиент и сервер) безопасный протокол, для удаленного доступа к командной оболочке Linux. Весь трафик между роботом и удаленным компьютером (команды, приём/передача файлов или визуализации) всегда осуществляются по протоколу, защищенному RSA-кодами.
MySQL - сервер баз данных.
Firestarter - Firewall. Безопасность также очень важна в мире Linux, поэтому была добавлена мощная программа, которая полностью графическим способом позволяет контролировать входящий и исходящий трафик.
Qbo GUI - графический интерфейс взаимодействия с роботом. Разработан TheCorpora и позволяет легко получить доступ ко всем функциями робота. На данный момент он не был установлен так как не является достаточно стабильным, но будет установлен на будущие версии OpenQbo.
Другие необходимые пакеты, (ориентированные на робототехнику):
* последние драйверы ALSA - необходимы для работы Julius.
* PHP - для проектирования Qbo GUI.
* Gstreamer - нужно, среди прочего, чтобы получать изображения с веб-камер Qbo.
* GCC - компилятор для C
* Python - язык высокого уровня. Полезен, чтобы быстро создавать небольшие программные модули, например, для ROS.
Прототип робота Qbo работал на плате формата Mini-ITX, ASUS AT3IONT-I
Последние новости Qbo
Робота Qbo научили отвечать на вопросы собеседника, используя материалы из википедии.
Достаточно обратиться к роботу и произнести фразу «I have a question, Qbo» («У меня есть вопрос, Qbo»). Qbo уточнит - правильно ли расслышал вопрос, а потом зачитает выдержку из википедии. Предусмотрен вариант и отсутствия слова в базе Qbo - в этом случае, робот попросит произнести слово по буквам.
Недавно появилось видео, на котором робот учится распознавать самого себя в зеркале:
После того, как социального робота Qbo научили распознавать себя в зеркале оставался один шаг до распознавания другого робота Qbo.
Чтобы робот смог отличить своё отражение в зеркале от другого робота, разработчики реализовали, чтобы в процессе распознавания, светодиодный нос робота мигал случайным образом. Вероятность того, что два робота будут генерировать одинаковую последовательность вспышек очень низка и этим достигается успешное распознавание другого робота.
Распознав другого аналогичного робота, Qbo может с ним поговорить.
В отличие от стандартной практики, когда роботы взаимодействуют между собой по какому-нибудь протоколу, разработчики Qbo, используют программное обеспечение для распознавания речи (Julius) и синтеза голоса (Festival), что позволяет одному роботу распознавать речь другого и соответствующим образом реагировать на вопросы, используя небольшую запрограммированную базу знаний.
Т.о., используя динамик, микрофон и вышеупомянутое ПО, роботы Qbo способны вести беседу.
Социальный робот Qbo доступен для предзаказа (€755.00-€3,795.00)!
Проект Qbo, был задуман с твёрдым намерением создания платформы для разработки искусственного интеллекта, который с каждым днем сможет становиться немного умнее.
Чтобы добиться этого, были выделены два основных направления работы:
1. разработка стандартной робо-платформы, способствующей созданию экосистемы для исследований и развития сообщества;
2. создание дизайна, который является достаточно привлекательным для людей, чтобы использовать эту платформу в своей повседневной жизни.
Так же, в основе проекта лежит идеология Open Source. Так как, робототехника должна разрабатываться в рамках открытого общества, в котором не будет места старой модели замкнутых лабораторий, окруженных абсолютной секретностью, где группа инженеров работает над прототипами, которые никогда не увидят свет или, в лучшем случае, будут использоваться в качестве инструментов маркетинга для других продуктов никак не связаных с робототехникой.
По этим причинам, Qbo создаётся в виде недорогой открытой структуры, вокруг которой могла бы возникнуть реальная экосистема, позволяющая разрабатывать и улучшать алгоритмы искусственного интеллекта.
Сообщество робототехников, электронщиков и компьютерщиков, экспертов и любителей, которые смогут обмениваются между собой своими проектами и опытом, а в результате получить возможности неограниченного диапазона применений (безопасность, телемедицина, дистанционного присутствия и т.д.).
Проект Qbo, стал возможным благодаря компаниям, которые разделяют это видение:
Willow Garage, основанная Scott Hassan в 2006 году и её платформе для разработки - ROS.
Arduino - гибкость этой платформы позволила разработать два котроллера (из пяти содержащихся в Q.bo).
Linux - открытая операционная система, которая позволила всем компонентам платформы работать вместе.
Использование доступных и стандартных электронных компонентов, стало еще одним фактором, который является ключевым для Qbo, что позволило свести к минимуму усилия и посвятить все ресурсы базовой платформе, без необходимости изобретать велосипед.
Дизайн + Linux + Arduino + ROS + Стандарты = QBO
Именно благодаря всем этим преимуществам Open Source, Q.bo родился как платформа, которая сочетает в себе замечательный дизайн и новейшие технологии.
Наборы Q.bo
Q.bo Basic Kit (€755.00)
- базовый набор Q.bo, состоит из пластиковых деталей корпуса и механических частей робота. Так же, в базовый комплект входят две HD веб-камеры, антенна Wi-Fi и несколько Q.boards (только PCB).
Q.bo Complete Lite (€2,845.00)
- представляет собой полностью собранного робота Q.bo. Доступен выбор между Q.bo Complete Lite и Q.bo Complete Pro (€3,795.00). Версия Q.bo Complete Pro включает в себя материнскую плату Mini-ITX DQ67EP с процессором Intel Core i3 и 40Гб SSD-диск, а версия Q.bo Complete Lite поставляется с материнской платой Intel D2700MUD с микропроцессором Intel ATOM D2700 и 40Гб HDD. Обе версии поставляются с 2 Гб оперативной памяти DDR3.
Версии Q.bo Complete (Lite и Pro) предназначены для тех, кто не хочет тратить время на выбор и сборку компонентов робота. Например, для разработчиков программного обеспечения, эти версии позволят не беспокоиться о механической и электронной начинках робота и сосредоточиться на написании программного обеспечения.
Q.bo Complete Pro продается по более высокой цене, чем Q.bo Complete Lite, но он позволяет выполнять более тяжёлых вычислительных алгоритмов, большую плавность движений и большую скорость выполнения алгоритмов, благодаря гораздо более мощному микропроцессору Intel Core i3 (по сравнению с Intel ATOM D2700 в версии Q.bo Complete Lite).
Контроллеры Q.bo
Q.board1 - контроллер на базе МК ATmega1280 (совместим с Arduino IDE), с интегрированным драйвером двигателей (на L298N) (позволяет управлять два двигателя 12V, 2A).
Контроллер управляет:
* двумя двигателями (EMG30)
* аудио-усилителем (MAX9744)
* шиной I²C
Q.board2 - контроллер, распологающийся в голове Qbo (совместим со стандартной Arduino Duemilanove)
- контролирует светодиоды, изображающие рот робота
Q.board3 - контроль питания (на 32-битном stm32f103 Cortex-M3)
Q.board4 - плата с сенсорами (IMU) (3-х-осевые гироскоп (L3G4200D) и акселерометр (LIS35DE)), доступными по интерфейсу I²C.
Q.board5 - плата со светодиодами (20 стандартных светодиодов), изображающими «рот» робота
Система питания
Система питания, робота Qbo построена на:
* аккумуляторах
Optimum Battery LiFePO4 12.8V 10Ah
Iberobotics Battery LiFePO4 12.8V 10Ah
* DC/DC преобразователе PICOPSU 150-XT (ATX, 150 Watt) для питания встроенного компьютера формата Mini-ITX
* Адаптере AC/DC 15V, служащего для питания робота от сети и зарядки его аккумуляторов
Заказать робота Qbo можно здесь
Смотрите также:
Суперкомпьютер IBM Watson победил в телевикторине Jeopardy (российский аналог - Своя игра)
Робот NAO
Юмор на кремниевой основе
Передачи и документальные фильмы о роботах
Робот-мусорщик на улицах Печчоли